

خوارزميات التعلم الآلي قادرة على القيام بأشياء مذهلة، بدءًا من التفوق في ألعاب الطاولة والتعرف على الوجوه، وصولًا إلى أتمتة المهام اليومية والتنبؤات واتخاذ القرارات. ولكن من الصعب تصديق أن تطور هذه التقنية بدأ قبل أقل من قرن. من المستحيل تحديد وقت دقيق لبداية تاريخ التعلم الآلي، وبدلاً من ذلك، يمكن اعتبار التعلم الآلي مزيجًا من جهود العديد من الأفراد الذين ساهموا باختراعاتهم، خوارزمياتهم، أو إنجازاتهم في تطويره وتشكيله.
فيما يلي، حاولنا تقديم نبذة مختصرة عن تاريخ تعلّم الآلة والأشخاص الذين ساهموا في تطويره، بالإضافة إلى استعراض الأحداث المهمة في تاريخ التعلم الآلي.
تاريخ تعلّم الآلة
1943
تاريخ التعلم الآلي بدأ مع أول نموذج رياضي للشبكات العصبية الذي تم تقديمه في المقالة العلمية “حساب منطقي للأفكار الكامنة في النشاط العصبي” من قبل والتر بيتس ووارن مكولوتش. حيث قدما نموذجًا رياضيًا للعصب البيولوجي، وصوّرا كل عصبون في الدماغ على أنه معالج رقمي بسيط، واعتبرا الدماغ كآلة حسابية كاملة. كان لهذا النموذج قدرة محدودة للغاية ولم يكن لديه أي آلية للتعلم، ولكنه أسس لظهور الشبكة العصبية الاصطناعية والتعلم العميق.
1949
في عام 1949، نشر دونالد هيب كتابًا بعنوان “تنظيم السلوك”. قدم هذا الكتاب نظريات حول كيفية ارتباط السلوك بنشاط الدماغ والشبكات العصبية، وأصبح أحد الأسس لتطوير التعلم الآلي.
1950
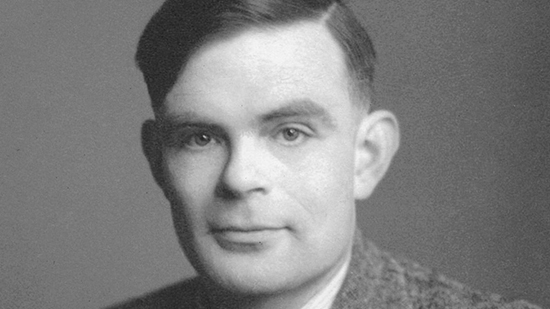
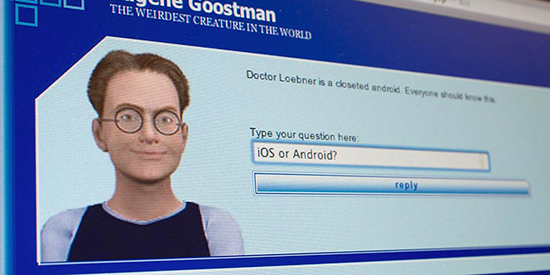
في عام 1950، قدم آلان تورينغ، عالم الرياضيات وعالم الكمبيوتر، اختبار تورينغ. في هذا الاختبار، يعتبر النظام ذكيًا بما يكفي إذا استطاع الإجابة على أسئلة أحد الحكام بطريقة تقنعه أن الشخص الذي يجيب هو إنسان وليس آلة. من المثير للاهتمام أن هذا الاختبار لا يزال يُعتبر تحديًا كبيرًا حتى اليوم.
1951
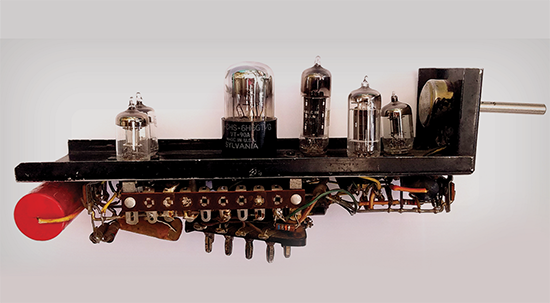
في عام 1951، عندما كانت معظم أجهزة الكمبيوتر لا تزال تستخدم البطاقات المثقوبة للتشغيل، قام مارفن مينسكي ودين إدموندز ببناء أول شبكة عصبية اصطناعية تُسمى SNARC، والتي كانت تتألف من 40 تشابكًا عصبيًا من نوع “هَب” (تم تعريف هذه التشابكات في الكتاب الذي كتبه دونالد هيب في عام 1949) وكانت مرتبطة بذاكرة قصيرة المدى.
1952
في عام 1952، قام آرثر صموئيل في شركة IBM بتطوير برنامج للعبة الداما (Checkers) على مستوى بطولة، والذي استخدم تقنية تقليم ألفا-بيتا (Alpha-Beta Pruning) لقياس احتمالية الفوز بدلاً من البحث في جميع المسارات الممكنة. اعتمد على فرضية أن الخصم يلعب بشكل مثالي، واستخدم خوارزمية minimax لإيجاد الحركة الأمثل. بالإضافة إلى ذلك، صمم آليات لتحسين البرنامج بشكل مستمر، مثل مقارنة الحركات السابقة بفرص الفوز.

1956
في عام 1956، يُعتبر المشروع البحثي الصيفي في كلية دارتموث بمثابة المهد الذي انطلقت منه فكرة الذكاء الاصطناعي. قام جون مكارثي بدعوة أحد عشر شخصًا من كبار الرياضيين والباحثين والعلماء في مجالات الرياضيات والهندسة وعلوم الكمبيوتر والعلوم المعرفية إلى كلية دارتموث للتفكير في إمكانية إنشاء آلات قادرة على التفكير، وذلك خلال فترة استمرت حوالي ستة إلى ثمانية أسابيع.

1958
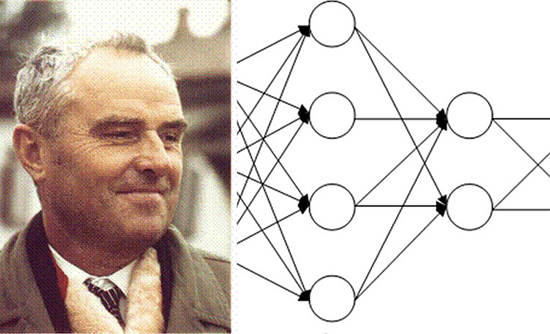
في عام 1958، حاول فرانك روزنبلات تصميم أول شبكة عصبية حاسوبية تُسمى “Perceptron”. كان “Perceptron” يمتلك القدرة على التعلم الذاتي لتنفيذ التصنيف الثنائي بشكل مستقل، وتم تصميمه لاستقبال المدخلات وإنشاء مخرجات مثل التسميات والتصنيفات.

1963
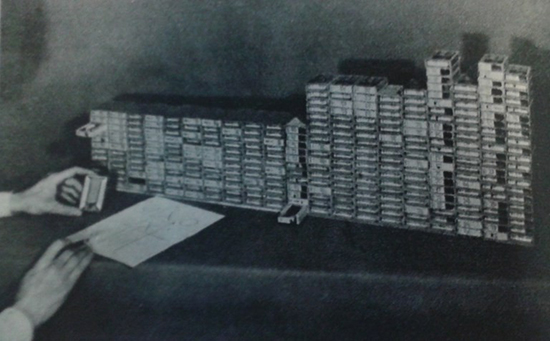
Donald Michie با 304 جعبه چوب کبریت توانست برنامهای توسعه دهد که این قابلیت را داشت که بازی tic-tac-toe (بازی دوز) را بیاموزد.
1965
في عام 1965، قام أليكسي إيفاخنينكو وفالنتين لابا بتطوير تمثيل هرمي للشبكة العصبية، والذي يُعتبر أول “Perceptron” متعدد الطبقات. استخدم هذا النموذج دالة تنشيط غير خطية وتم تدريبه باستخدام طريقة النمذجة الجماعية للبيانات.
1967
في عام 1967، نشر توماس كوفر وبيتر إي. هارت مقالة في مجلة IEEE Transactions on Information Theory حول خوارزمية “أقرب جار” (Nearest Neighbor Algorithm). تتيح هذه الخوارزمية لأجهزة الكمبيوتر استخدام تقنيات بدائية للتعرف على الأنماط. عند إعطاء البرنامج عينة جديدة، يقوم بمقارنتها بالبيانات الموجودة ويصنفها بناءً على أقرب جار لها، أي العينة الأكثر تشابهًا المخزنة في الذاكرة.
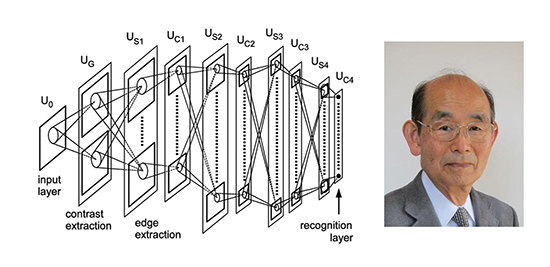
1980
في عام 1980، نشر كونيهكو فوكوشيما، عالم الكمبيوتر الياباني، عمله حول “Neocognitron”. وهي شبكة عصبية اصطناعية هرمية متعددة الطبقات صُممت للتعرف على الأنماط، مثل التعرف على الحروف المكتوبة بخط اليد. أدى هذا العمل إلى تطوير الشبكات العصبية التلافيفية (Convolutional Neural Networks) التي تُستخدم اليوم في تحليل الصور.
1979
في عام 1979، قام طلاب جامعة ستانفورد بتطوير “Stanford Cart”، وهو روبوت يتم التحكم فيه عن بُعد. كان هذا الروبوت قادرًا على التحرك بشكل مستقل في الفضاء من خلال رسم الخرائط ثلاثية الأبعاد والملاحة، وكان يمكنه تجاوز العقبات بمفرده.

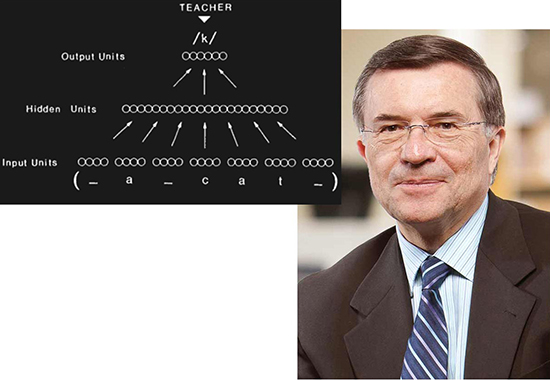
1986
في عام 1986، قام تيرينس سجنوسكي بإنشاء NETtalk، وهي شبكة عصبية جمعت بين معرفته في علم الأحياء والشبكات العصبية. كانت هذه الشبكة العصبية قادرة على تعلم كيفية نطق الكلمات الإنجليزية عن طريق المطابقة والمقارنة مع النسخ الصوتية.
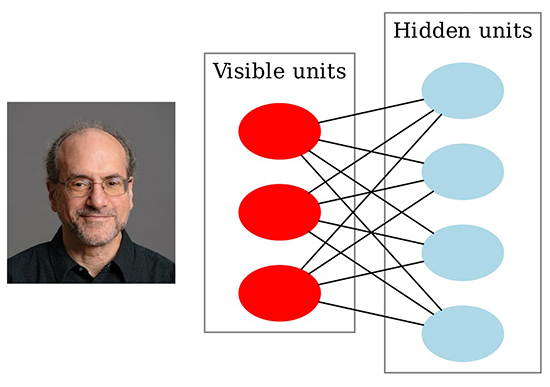
1986
في عام 1986، قدم بول سمولينسكي آلة بولتزمان المقيدة (Restricted Boltzmann Machine)، التي كانت قادرة على تحليل مجموعة من المدخلات وتعلم التوزيع الاحتمالي منها. يُستخدم هذا الخوارزم في نمذجة الموضوعات – على سبيل المثال، تحديد الموضوعات المحتملة لمقال بناءً على أكثر الكلمات شيوعًا فيه – أو في التوصيات المستندة إلى الذكاء الاصطناعي.
1990
في عام 1990، قدم روبرت شابير في مقالته بعنوان “قوة التعلم الضعيف” خوارزمية “Boosting”، وهي خوارزمية تهدف إلى تعزيز قدرة التنبؤ لنموذج الذكاء الاصطناعي. بدلاً من استخدام نموذج قوي واحد، يقوم “Boosting” بإنشاء العديد من النماذج الضعيفة، ويحولها إلى نماذج أقوى من خلال دمج التنبؤات معًا.
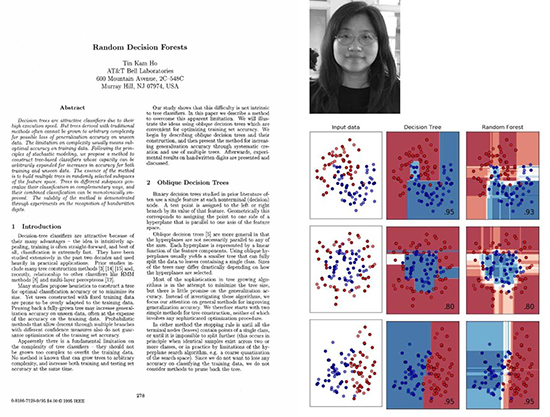
1995
في عام 1995، نشر تين كام هو، وهو عالم حاسوب يعمل لدى IBM، مقالة مؤثرة حول “غابات القرارات العشوائية” (Random Decision Forests)، وهي طريقة للتعلم الجماعي. يقوم هذا الخوارزم بإنشاء عدة أشجار قرارات ودمجها في “غابة”. من خلال استخدام عدة أشجار قرارات مختلفة، تتحسن دقة النموذج وقدرته على اتخاذ القرارات بشكل ملحوظ.
1997
في عام 1997، صنع التاريخ برنامج الشطرنج الحاسوبي “Deep Blue” الذي تم تطويره بواسطة شركة IBM، بعد أن هزم بطل العالم في الشطرنج آنذاك، غاري كاسباروف. فاز كاسباروف في المباراتين الأوليين، ثم خسر في ثلاث مباريات تالية، وتعادل في المباراة النهائية.

2006
في عام 2006، قام جيفري هينتون وزملاؤه في مقالة بعنوان “خوارزمية تعلم سريعة للشبكات العميقة المعتقدة” بوضع مصطلح “التعلم العميق” (Deep Learning) لوصف الخوارزميات التي تساعد أجهزة الكمبيوتر على التعرف على أنواع مختلفة من الأشياء والأحرف النصية في الصور ومقاطع الفيديو.
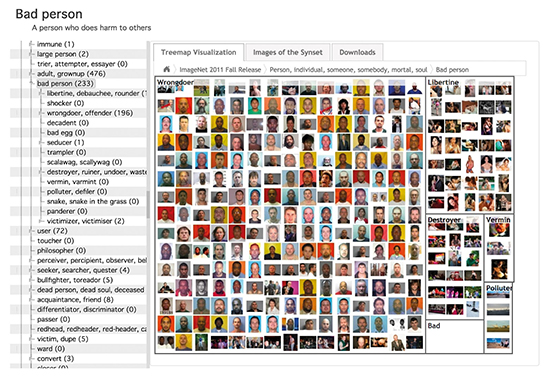
2009
في عام 2009، تم إطلاق قاعدة بيانات ضخمة من الصور المُعَلَّمة تُسمى “ImageNet” بواسطة فاي فاي لي. كانت تهدف إلى توسيع البيانات المتاحة لتدريب الخوارزميات، لأنها كانت تؤمن بأن الذكاء الاصطناعي وتعلم الآلة يحتاجان إلى بيانات تدريبية جيدة ليصبحا فعّالين وذوي فائدة حقيقية.
2012
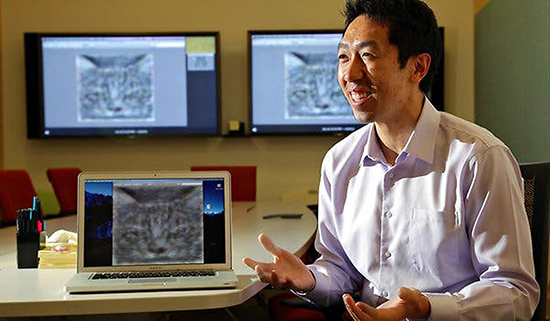
في عام 2012، قام فريق مختبر X في شركة جوجل، بناءً على خلفية واسعة في تعلم الآلة، بإنشاء شبكة عصبية تُسمى “Google Brain”. اشتهرت هذه الشبكة بقدرتها العالية على معالجة الصور، حيث كانت قادرة على التعرف بدقة على القطط ووجوه وأجساد البشر في الصور.
2014
في عام 2014، قام فريق البحث في فيسبوك بتطوير “DeepFace”، وهو نظام للتعرف على الوجوه قائم على التعلم العميق. كانت هذه الشبكة العصبية مكونة من 9 طبقات وتم تدريبها باستخدام 4 ملايين صورة من مستخدمي فيسبوك. كان “DeepFace” قادرًا على التعرف على الوجوه في الصور بنفس دقة البشر تقريبًا (حوالي 97.35٪).
2016
في عام 2016، هزم “AlphaGo” لي سيدول، لاعب الـ Go المحترف، بنتيجة أربعة مقابل واحد في لعبة Go، التي تُعتبر واحدة من أكثر الألعاب اللوحية تعقيدًا. أكد اللاعبون المحترفون أن هذا الخوارزم كان قادرًا على القيام بحركات إبداعية لم يروها من قبل.

في عام 2016، قدم مجموعة من العلماء برنامج “Face2Face” في مؤتمر الرؤية الحاسوبية والتعرف على الأنماط. كان “Face2Face” قادرًا على تعديل الفيديوهات في الوقت الفعلي، واستبدال حركات وجه شخص بحركات وجه شخص آخر، بحيث يبدو وكأن الشخص في الفيديو يقول شيئًا لم يقله في الواقع. تشكل المنطق والخوارزميات الخاصة بـ “Face2Face” الأساس لمعظم برامج الـ “Deepfake” المستخدمة اليوم.
2017
في عام 2017، بدأت شركة “Waymo” باختبار السيارات ذاتية القيادة في الولايات المتحدة، وفي وقت لاحق من نفس العام أطلقت أول خدمة نقل تجاري ذاتي القيادة في العالم بمدينة فينيكس تحت اسم “Waymo One”.

2020 وما بعد
في عام 2020، قدم فيسبوك التعلم القائم على المعتقد العودي أو ReBeL؛ خوارزمية لديها القدرة على العمل في جميع الألعاب ذات المحصلة الصفرية للاعبين وحتى الألعاب ذات المعلومات غير الكاملة. قدمت Deepmind أيضًا خوارزمية Player of Games في عام 2021.
حقق AlphaFold، الذي طورته شركة جوجل، مستوى عاليًا جدًا من الدقة في التنبؤ ببنية البروتينات في عام 2021. كما نشرت جوجل ورقة بحثية بعنوان Switch Transformers في عام 2022، حيث قدمت تقنية تعتمد على خوارزمية معدلة لتدريب نماذج اللغة بأكثر من تريليون معلمة.
هناك عدد لا يحصى من الباحثين الذين ساهمت إنجازاتهم بشكل مباشر أو غير مباشر في ظهور وازدهار التعلم الآلي. حاولت هذه المقالة فقط سرد تاريخ موجز تعلّم الآلة من خلال مراجعة بعض المقالات والأحداث الرئيسية.
